歡迎訪問淄博弘鋒機械官網(wǎng)!

專注液壓升降貨梯生產(chǎn)定制20年
產(chǎn)品質(zhì)量有保 售后7×24小時服務(wù)
24小時咨詢熱線:15662672636
歡迎訪問淄博弘鋒機械官網(wǎng)!
專注液壓升降貨梯生產(chǎn)定制20年
產(chǎn)品質(zhì)量有保 售后7×24小時服務(wù)
 24小時咨詢熱線: 15662672636
24小時咨詢熱線: 15662672636 手機:15662672636
電話:15662672636
郵箱:didihay@qq.com
地址:山東省濟南市濟陽縣
發(fā)布時間:2023-06-10 點此:4131次
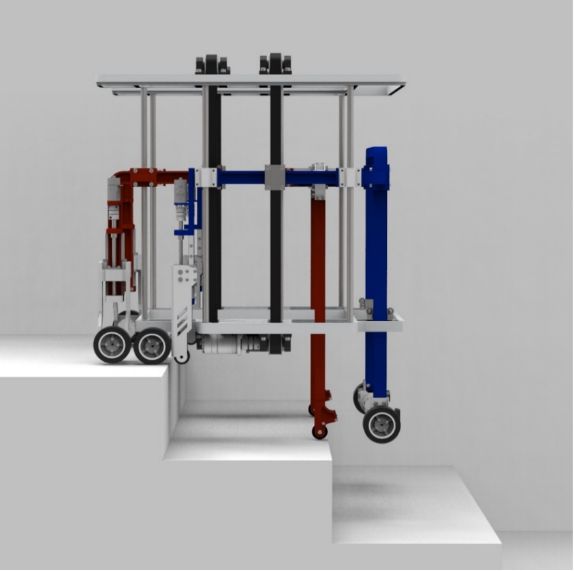
搬運機器人是可以進行自動化搬運的工業(yè)機器人隨著近年來物流倉儲行業(yè)的發(fā)展,智能技術(shù)的進步,搬運機器人在技術(shù)上有全自動爬樓搬運機器人了很大提升,也逐漸在倉儲行業(yè)得到認可,那么,搬運機器人都有哪些優(yōu)勢呢搬運機器人的優(yōu)點是可以通過編程來全自動爬樓搬運機器人;將這些信息送給機器人的處理器來調(diào)整運動控制單元,從而達到智能跟隨的目的智能搬運機器人采用uwb跟隨,通過與人協(xié)作,將機器的高效不知勞累,與人的靈活相結(jié)合實現(xiàn)了零散重物的高效安全搬運。
1 惡劣工作環(huán)境及危險工作,如壓鑄車間及核工業(yè)等領(lǐng)域的作業(yè)環(huán)境\n2 特殊作業(yè)場合和極限作業(yè),如火山探險深海探密和空間探索等領(lǐng)域\n3 自動化生產(chǎn)領(lǐng)域,如焊接機器人材料搬運機器人檢測機器人裝配機器全自動爬樓搬運機器人;近日,杭州電子科技大學(xué)的學(xué)生研發(fā)了一款智能快遞派送機器人,能解決“快遞派送最后一厘米問題”它叫“爬樓梯快遞派送機器人”,可以先給快遞買家發(fā)短信,得到“在家”確認后告知對方多長時間到,然后出發(fā)送件,它可以在樓宇間。

由日本本田公司主導(dǎo)開發(fā)的“阿西莫”系列機器人的最新型號在西班牙巴塞羅那亮相經(jīng)過七年的開發(fā),如今的機器人“阿西莫”不僅能夠爬樓梯,而且能夠為人端茶倒水5根手指能靈活運動新型“阿西莫”機器人身高1米2,體重43公斤。
搬運機器人是一種可以進行自動搬運的工業(yè)機器人近年來,隨著物流倉儲行業(yè)的發(fā)展和智能技術(shù)的進步,搬運機器人在技術(shù)上有了很大的提高,并逐漸在倉儲行業(yè)得到認可搬運機器人的優(yōu)點是可以通過編程完成各種預(yù)期任務(wù)在其自身的。
AGV屬于工業(yè)搬運機器人,它裝備有自動導(dǎo)引裝置,由計算機控制,具有移動自動導(dǎo)航多傳感器控制網(wǎng)絡(luò)交互等功能,在實際生產(chǎn)中最主要的用途是搬運AGV機器人需求領(lǐng)域較為集中,主要在應(yīng)用于工業(yè)制造和智能倉儲,提高物流效率。
是智能機器人,其中往下還可以分為家用機器人娛樂機器人廚師機器人搬運機器人類人機器人這些機器人都可能幫人拿東西。
AGV搬運機器人一般都是非標(biāo)定做的,要明確自身需求和使用條件,再向正規(guī)廠家咨詢參考資料來源 agv。
家用機器人種類介紹1電器機器人又稱應(yīng)用機器人,他們就像具備智能的家用電器,勤奮的吸塵器機器人是這種機器人的代表,其外形像厚厚的飛碟,其超聲波監(jiān)視器能避免其撞壞家具,紅外線眼可避免其失足跌下樓梯除了清潔,另一。
搬運作業(yè)是指用一種設(shè)備握持工件,是指從一個加工位置移到另一個加工位置搬運機器人可安裝不同的末端執(zhí)行器以完成各種不同形狀和狀態(tài)的工件搬運工作搬運機器人被廣泛應(yīng)用于機床上下料沖壓機自動化生產(chǎn)線自動裝配流水。
1移動速度在平坦地面上行進速度不低于1ms2推力能夠施力進行推拉操作,推力不低于800N3轉(zhuǎn)向半徑機器人能夠在15m的半徑內(nèi)轉(zhuǎn)彎4增量式定位能夠?qū)崿F(xiàn)高精度的定位功能,定位誤差不超過5mm車站搬運的。
1、2焊接行業(yè)工件的點焊弧焊等,天地軌式都可用,具體看實際需求3打磨行業(yè)汽車白車身手機打磨玻璃切割打磨等工位都可應(yīng)用第七軸4包裝行業(yè)碼垛行業(yè)搬運機器人食品搬運磚瓦泥沙搬運建材搬運等。
2、高等工業(yè)潤滑油爬樓機納德是電動載物爬樓機,是一種新型的載貨爬樓設(shè)備,同時具備搬運重物上下樓與平地運輸?shù)墓δ軐儆谥悄軝C器人,該產(chǎn)品工作過程中需要降低阻力來增加動力和降低磨損,使用潤滑效果好的高等工業(yè)潤滑油能。
3、在研發(fā)人形機器人的過程中,全自動爬樓搬運機器人我們時常參照人類自身的規(guī)律找到突破點,比如說為了提高步幅和步速,我們采用仿人行走的方法去改變原來平掌著地的方式,優(yōu)化步態(tài)算法如果全自動爬樓搬運機器人你細心觀察的話,可以看到人落腳的時候,其實是后腳跟先找地。
4、搬運機器人transfer robot是可以進行自動化搬運作業(yè)的工業(yè)機器人最早的搬運機器人出現(xiàn)在1960年的美國,Versatran和Unimate兩種機器人首次用于搬運作業(yè)搬運作業(yè)是指用一種設(shè)備握持工件,是指從一個加工位置移到另一個加工。
相關(guān)推薦




